Before diving deeper into the theory of Dynamic positioning, it is wise to give one an answer – why do we actually need dynamic positioning? One example is supporting underwater inspection operations using an ROV.
Let’s assume a company operating a deepwater pipeline that needs its subsea assets to be inspected. The size of the area liable for inspection and the depth of water do not allow any fixed installation from which such a survey might be undertaken. The charterer is looking for a vessel capable of both precise station-keeping AND agile maneuverability. In this scenario, a dynamically positioned ROV (remotely operated vehicle) support vessel with a decent power plant capability is an ideal solution.

How is this type of offshore vessels different from the others? Here the concept of a steady station-keeping is slightly modified towards keeping the position relative to a non-fixed object. As a Dynamic positioning operator on board a dynamically positioned ROV support vessel, one might be operating the vessel’s Dynamic positioning system in a specially designated “ROV follow” or “Follow target” mode. Since the Dynamic positioning presumes maintaining position and heading within a fixed setpoint, so can it act position-wise relative to a mobile setpoint.
In order to perform its functions, the Dynamic positioning system on such a vessel needs a particular set of position reference systems. It is understandable that should the vessel need to only keep its position while the underwater vehicle executes its task, satellite systems coupled with, for instance, Taut Wire, would suffice. But if the mission presumes following the ROV along its work scope, the above-mentioned set of position references would be inconsistent. The reason is simple: something must be in place to observe – and automatically maintain – the “mutual disposition” of a vessel to an ROV. Here is where a hydroacoustic position reference comes to use.
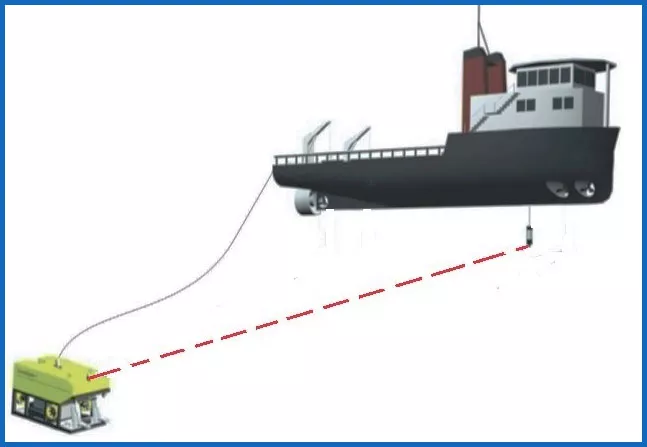
Such a position reference will include a transducer installed on board a vessel, and a transponder provided for an ROV. The system falls into a subclass of super short baseline systems that is capable of not only measuring the “range” between a transducer and a transponder, but is angle-sensitive too. This being said, the Dynamic positioning system will be provided with both a range and a direction (relative bearing) to the ROV, and will be able to maintain the relative disposition automatically, within the parameters of reaction and initiation of a follow-up movements set by a DPO.
Modern Dynamic positioning systems are very adjustable in terms of settings for ROV support tasks. The vessels engaged in such work are sometimes required to follow a submerged object with a certain aspect orientation, overcoming environmental conditions and other limiting factors. Well-trained personnel is thus vital for the successful completion of a vessel’s mission. At LERUS Group we conduct NI-approved DPO training with deep detail about different offshore operations and perform practical exercises, with one of the scenarios being ROV Follow Target Mode. Come and join the exciting world of dynamic positioning!